一般 4 軸 ビジョン 測定 機械 コントローラー スマート パッケージ
紹介
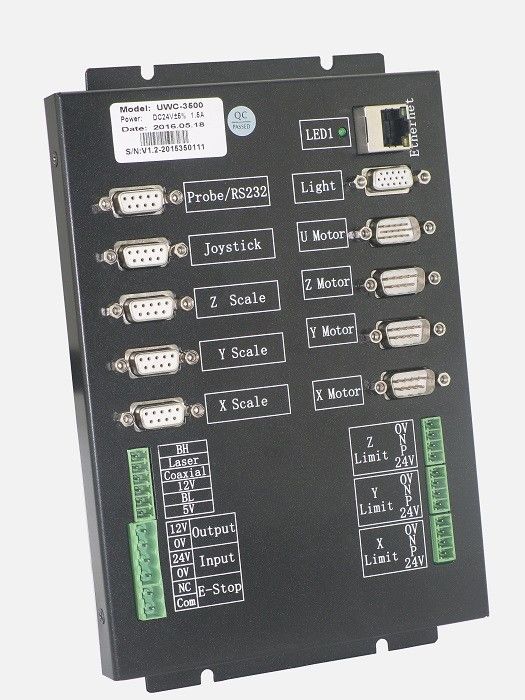
UWC 3500は,視力測定機や複合視力測定機,または自動化測定システムで使用される一般的な4軸フル・クローズループコントローラである.線形スケールまたはモーターエンコーダーで,閉ループ位置フィードバックUWC3500は高い精度を達成できます
特徴:
1高性能CPU+FPGA
2通信:イーサネットインターフェース,単一のAPI機能の実行時間は0.45ms未満です.
3方向+パルス制御モード,ステップモーター,ACサーボ,線形サーボ,DDMなどを制御することができる.
4. 完全なクローズループモーション制御,高速,正確,安定した高精度ロケーション. 先進的なクローズループ制御アルゴリズムと非常に少ないPIDパラメータは,ユーザーにとって簡単なターニングを保証します.
5S型速度曲線平面化,減速プロセスにおけるS段比を設定できます.
6位置付け戦略:
パルス+方向オープンループ制御
線形スケール/エンコーダー位置フィードバック・クローズループ制御,PID+VFF改良アルゴリズム,ゼロシフトの問題を解決する.
7モーションモード:
ポイントからポイント,JOGモード,使いやすい柔軟なホーミングモード,2軸または3軸線形インターポレーション,水平弧インターポレーション,タッチ探査機,ジョイスティックモード.
8セキュリティポリシー:
機械の回転の自動調整機能,制限論理と方向,モーターパラメータと線形フィードバック方向を自動的に設定する.リフード・ムーブメントのエラーを排除する.
軸が限界に近づくと 前進減速が起こりますが 方向転換の前に 移動速度が強制的に制限されます
ソフトウェアの制限がサポートされています
9. API 機能はオブジェクト面のエンカプスレーションを使用しており,容易なプログラミングを提供します. ほとんどのパラメータはデバッグソフトウェアによって設定されます.
10高い統合,高性能,安定し,容易な生産と保守.
11UWC-3500はSMT生産技術を使用し,安定性と信頼性を保証します.
12UWC3500は,非標準装備に適し,機能のカスタマイズも可能です.
13. UWC3500はオンラインファームウェア更新機能をサポートしています. ユーザーはマシンからコントローラを削除する必要はありません. 機能の更新と拡張が簡単です.装置の開発とターニングサイクルを短縮する.
14外部UWC348 IOモジュール 最大26イン 26アウト
15. 位置比較マッチング機能,正確にマッチすることができます,またユーザーはマッチングトリガーの範囲を設定することができます,トリガー出力はカメラまたはレーザーセンサーに接続できます.
16操作ストロボフラッシュ光源制御機能とCCD位置マッチトリガー機能
17. 強力なデバッグソフトウェアが含まれ,操作が簡単,ユーザがマシンを回すのに簡単です.
パラメータ
| ポイント |
ミン
|
典型的な
|
マックス
|
ユニット
|
| API 動作時間 |
0.425
|
0.43
|
0.45
|
ms
|
| 入力電力の電圧 |
22.5
|
24
|
26
|
VDC
|
| 12V 補助電源出力電圧 |
11.76
|
12.05
|
12.24
|
VDC
|
| 12V 補助電源出力 |
0
|
2.0
|
2.5
|
A について
|
| 5V電源出力電圧 |
5.1
|
5.2
|
5.25
|
VDC
|
| 5Vの電源出力 |
0
|
1.8
|
2.0
|
A について
|
| X/Y/Z モーターインターフェイス 24V 負荷能力 |
0
|
3.0
|
4.0
|
A について
|
| 方向パルス周波数 |
-
|
-
|
6.5
|
メガHz
|
| 周波数解像度 |
0.006
|
-
|
-
|
Hz
|
| 線形スケール数値範囲 |
- 2147483648 - わかった
|
-
|
2147483647
|
CNT
|
| 方向パルスカウント範囲 |
- 2147483648 - わかった
|
-
|
2147483647
|
CNT
|
| 速度調整レベル |
-
|
-
|
1,000,000,000
|
32ビット DDS
|
| 線形スケール解像度サポート |
-0だった01
|
-
|
10000
|
ええと
|
| 線形スケール信号出力周波数 |
-
|
-
|
6.5
|
メガHz
|
| 制御器の一般入力/出力 |
-
|
-
|
-
|
ターミナル
|
| 高速RS232通信インターフェイス |
-
|
2
|
-
|
ターミナル
|
| 外部IN入力/出力 (1つのRS232通信インターフェースを使用) |
-
|
24/24
|
-
|
ターミナル
|
| ステップ駆動電流出力 |
0.07
|
-
|
1.15
|
A (RMS)
|
| ステップ駆動分部 |
16
|
16
|
16
|
|
仕様
| 違う |
仕様
|
UWC3500
|
| 1 |
電力供給
|
DC24V@2A入力,DC12V@2A出力 (CCD電源供給)
|
| 2 |
ソフトウェア互換性を測定する
|
V1と完全に互換性がある4
|
| 3 |
サイズ
|
255*118*53mm
|
| 4 |
コミュニケーション
|
隔離されたUSBまたはイーサネット (オプション)
|
| 5 |
密閉回路制御方針
|
PID+VFF+ デッドバンド
|
| 6 |
サーボリフレッシュ周波数
|
2.5KHz
|
| 7 |
抗機械ショック,速度を最適化
|
スマートモード
|
|
| 8 |
線形トランスデューサーのカウントの軸
|
3
|
|
| 9 |
基本制御軸
|
4
|
|
| 10 |
軸の支出
|
3軸パルス+方向を追加できる
|
|
| 11 |
XYZ軸制御モード
|
パルス+方向 RS422
|
|
| 12 |
XYZ軸支持型モーター (外部のモータードライバ付き)
|
ステップ/AC サーボ/ラインヤ サーボ/DC サーボとエンコーダーフィードバック
|
|
| 13 |
U軸制御モードA
|
RS232はポメアスのオートズームレンズに接続する
|
|
| 14 |
U軸制御モード B
|
2相ステップドライバーが組み込まれ,ステップモーターでオートズームレンズをサポートし,シングル/デュオ制限がサポートされています.
|
|
| 15 |
速度曲線計画
|
階段/S型
|
|
| 16 |
インターポレーション
|
多軸線形インターポレーション,2軸弧インターポレーション,3軸インターポレーション
|
| 17 |
マックス パルス周波数
|
5MHz
|
|
| 18 |
パルス周波数解像度
|
0.001Hz
|
|
| 19 |
速度調整レベル
|
1,000,000,000
|
|
| 20 |
アナログ電圧制御
|
-
|
|
| 21 |
線形トランスデューサーのカウント周波数
|
6MHz/ ((AまたはBフェーズ)
|
|
| 22 |
線形トランスデューサー信号の定義
|
RまたはSはオプション (R:12345S:26789)
|
|
| 23 |
探査器の測定機器
|
触覚探査機インターフェース回路
|
|
| 24 |
探査機のエラー処理回路
|
探査機の自動修理は可能だ ノンホミング
|
|
| 25 |
互換性のある探査機
|
レニショー/テサ 全シリーズトリガータッチ探査機
|
|
| 26 |
探査機処理モジュール
|
探査機高速ロック,ジョイスティック制御タッチポイント 自動停止と自動撤退,自動検出ポイントモード
|
|
| 27 |
ジョイスティック信号収集カードを組み込み
|
12ビット解像度,0-5Vアナログ電圧入力,3つのボタンを押して3つのLED,緊急停止スイッチ,速度調整ボタンを含む (3#ボタンと相互に除外される)
|
|
| 28 |
埋め込まれた照明制御カード
|
8 セクション 表面光 + 底部光 + 同軸光 0-200 レベル ソフトウェア調整
|
|
| 29 |
照明グレード設定機能
|
パラメータ設定ベースで明るさ要件を調整する 16 レベルハードウェア
|
|
| 30 |
輪郭光制御機能/LEDバンク制御機能
|
最大420mA 大型旅行機に適しています
|
|
| 31 |
複雑なタイプの外部照明インターフェース
|
5 リング 8 セクション単色プログラム可能な光,または 5 リング 8 セクション 4 色プログラム可能な光,上昇 / 回転可能な光に接続することができます
|
|
| 32 |
一般的なI/Oインターフェース
|
8段隔離入口,5段出口 (ULN2803対応)
|
|
| 33 |
システムクロック
|
年 月 日 時 分 秒 変更できません
|
|
| 34 |
ファームウェアアップグレード
|
迅速なソリューションと技術的な更新を提供します.
|
|
| 35 |
探査機のコネクタ
|
9ピンD-DUBコネクタ,配線が簡単で安定
|
|
| 36 |
ジョイスティック接続器
|
OTP6,OTP7,HC3 (多鍵ジョイスティック)
|
|
| 37 |
ジョイスティックデータ処理
|
制御器は内部でジョイスティックデータと運動制御を処理し,他の運動制御モードと相互,ジョイスティック探査機は自動停止と自動撤退で接触
|
|
| 38 |
外部の緊急停止
|
緊急停止ボタンは,モーターの電源を制御します
|
|
| 39 |
速度曲線計画
|
階段/S型
|
|
| 40 |
ソフトウェアの制限スイッチ
|
入手可能
|
|
| 41 |
ソフトウェアの減速点
|
入手可能
|
|
| 42 |
指定されたブレーキ距離
|
入手可能
|
|
| 43 |
サポートされているデバッグソフトウェア
|
V4.0 バージョン以上 (自動検出と設定パラメータ)
|
|

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。